Neue künstliche Muskeln imitieren menschliche Bewegung, um humanoide Roboter voranzutreiben
Forscher haben einen intelligenten künstlichen Muskel entwickelt, der biologische Muskel-Sehnen-Systeme nachahmt.

Kurzfassung
Warum das wichtig ist
- Forscher haben einen intelligenten künstlichen Muskel entwickelt, der biologische Muskel-Sehnen-Systeme nachahmt.
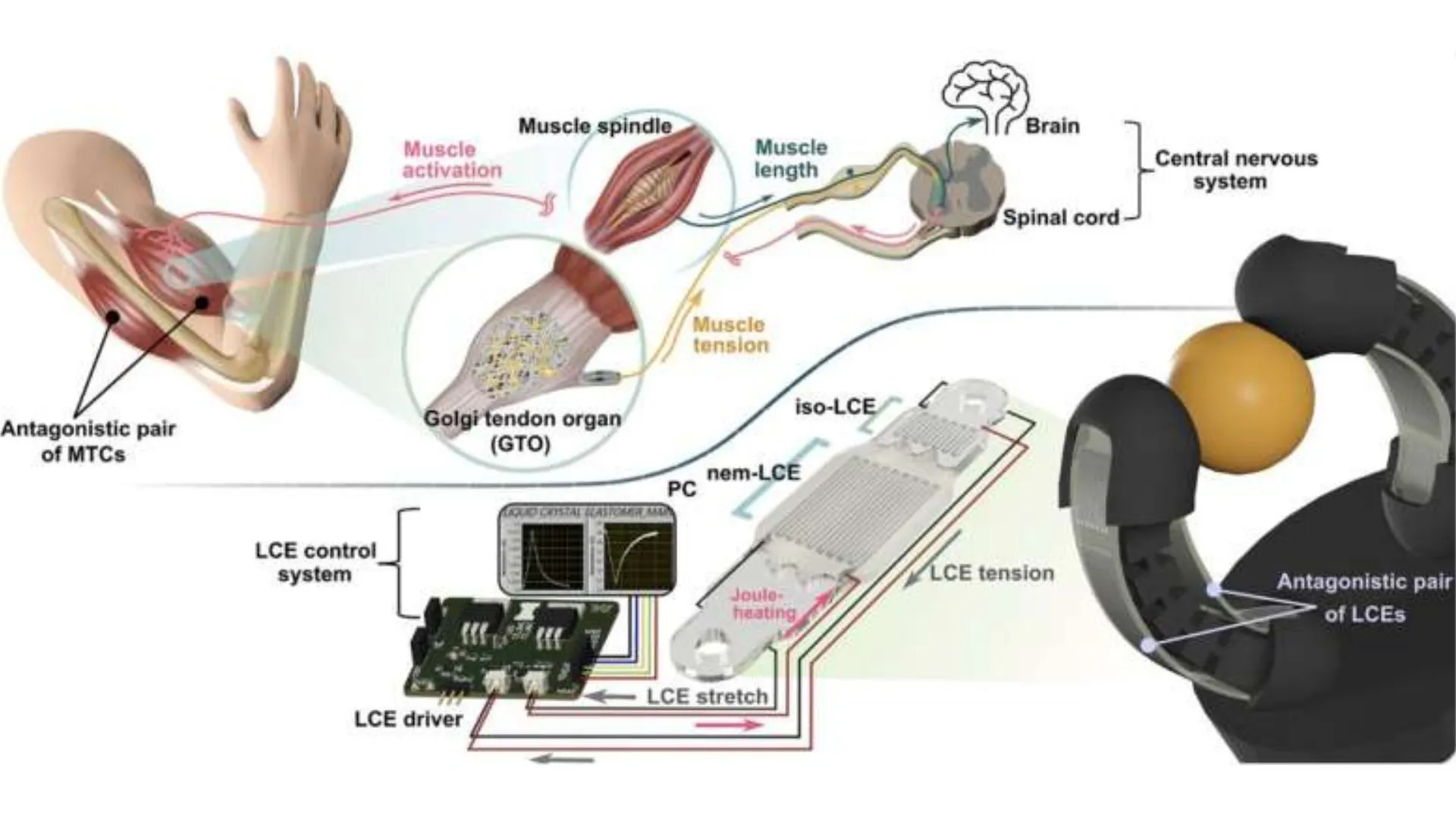
- Das Team der Seoul National University (SNU) baute das Gerät mit in einem flüssigkristallinen Elastomer eingebetteten Kanälen aus flüssigem Metall.
- Der künstliche Muskel zieht sich bei elektrischer Stimulation zusammen und misst gleichzeitig in Echtzeit die innere Kraft und die Länge.
SvyTech-Check
Redaktionelle Einordnung
Kernpunkt
Forscher haben einen intelligenten künstlichen Muskel entwickelt, der biologische Muskel-Sehnen-Systeme nachahmt.
Warum relevant
Dieser Durchbruch könnte zur Entwicklung adaptiver humanoider Roboter der nächsten Generation beitragen, die menschenähnliche Sinnes- und Bewegungsfähigkeiten aufweisen.
Einordnung
SvyTech ordnet die Meldung aus Interesting Engineering als Teil des Themenfelds Technologie ein und verweist auf den Originalartikel, damit Leser Fakten, Quelle und Kontext nachvollziehen koennen.
Dieser Durchbruch könnte zur Entwicklung adaptiver humanoider Roboter der nächsten Generation beitragen, die menschenähnliche Sinnes- und Bewegungsfähigkeiten aufweisen.
Kürzlich haben ein Forscherteam am MIT Media Lab und das Politecnico di Bari elektrofluidische Faser-Muskeln entwickelt, die für Roboter und Wearables eine natürliche, muskelähnliche Kraft, Geschwindigkeit und Steuerung bieten.
Menschähnliches Muskelsystem: Angesichts wachsender Anforderungen an menschenähnliche Roboter und assistive Systeme suchen Forscher nach robotischen Aktuatoren, die feine Bewegungen, Umgebungsüberwachung und sichere Interaktion ermöglichen. Die Anwendungsbereiche reichen bis hin zu Rehabilitations- und medizinischen Geräten.
Einordnung fuer Autofahrer
Allerdings stoßen herkömmliche künstliche Muskeln an Grenzen, da ihre Antriebs- und Sensorfunktionen getrennt sind, was zusätzliche Sensoren und komplexe Steuerungssysteme erfordert. Die Abbildung zeigt die Rückkopplung biologischer Muskeln sowie einen Robotergriff, der künstliche Muskeln aus flüssigkristallinen Elastomeren (LCE) verwendet.
Quellenprofil
Quelle und redaktionelle Angaben
- Quelle
- Interesting Engineering
- Canonical
- https://interestingengineering.com/ai-robotics/smart-artificial-muscle-humanoid-robot-motion
- Quell-URL
- https://interestingengineering.com/ai-robotics/smart-artificial-muscle-humanoid-robot-motion
Aehnliche Inhalte
Verwandte Themen und interne Verlinkung
Weitere Artikel aus aehnlichen Themenfeldern, damit Leser direkt im selben Kontext weiterlesen koennen.

Neue ra bei bionischen Prothesen: Verschmelzung von Gehirn und Maschine
Forscher des Sant'Anna-Instituts und der Cleveland Clinic haben durch die Kombination nachgewiesen, dass das Gehirn Muskelbewegungen als koordinierte Muster verarbeitet, was den Weg für Prothesen ebnet, die mit breiten Signalpaketen statt komplexer Einzelcodes arbeiten. In einer klinischen Studie an einem 34-jährigen Patienten ermöglichte diese Technologie eine sehr natürliche Wahrnehmung für permanente Implantate sowie Anwendungen in der Rehabilitation weiterentwickelt, wobei das Projekt durch Fördergelder der EU, Italiens sowie der USA unterstützt wird.
26.06.2026
Live Redaktion