Roboter lernen, sich bei gefährlichen Treppenstürzen selbst zu fangen
Roboter, die Treppen navigieren, sind weiterhin einem erheblichen Sicherheitsproblem ausgesetzt, da ein Verlust des Gleichgewichts häufig Stürzen mit zunehmender Kraft führt, was Schäden Roboter selbst sowie an sei
Kurzfassung
Warum das wichtig ist
- Roboter, die Treppen navigieren, sind weiterhin einem erheblichen Sicherheitsproblem ausgesetzt, da ein Verlust des Gleichgewichts häufig Stürzen mit zunehmender Kraft führt, was Schäden Roboter selbst sowie an sei
- Ein Verlust des Gleichgewichts führt oft zu Stürzen, bei denen die auftretenden Kräfte rasch zunehmen.
- Dies gefährdet nicht nur den Roboter selbst, sondern auch seine Umgebung.
SvyTech-Check
Redaktionelle Einordnung
Kernpunkt
Roboter, die Treppen navigieren, sind weiterhin einem erheblichen Sicherheitsproblem ausgesetzt, da ein Verlust des Gleichgewichts häufig Stürzen mit zunehmender Kraft führt, was Schäden Roboter selbst sowie...
Warum relevant
Trotz Fortschritten in der Gleichgewichtssteuerung und Pfadplanung bleiben diese Systeme anfällig.
Einordnung
SvyTech ordnet die Meldung aus Interesting Engineering als Teil des Themenfelds Technologie ein und verweist auf den Originalartikel, damit Leser Fakten, Quelle und Kontext nachvollziehen koennen.
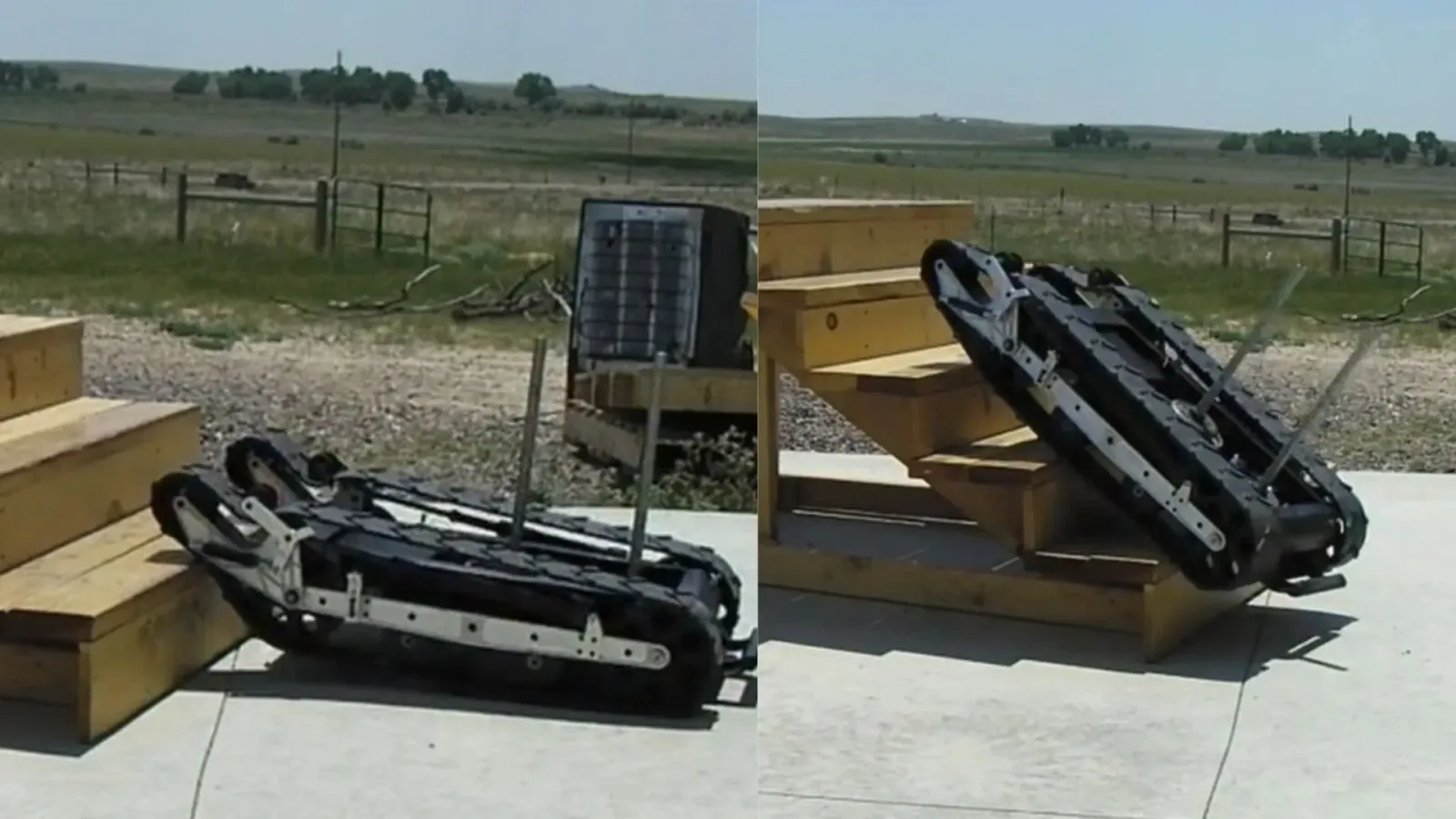
Eine neue Studie des Robotics and Automation Research (ROAR) Laboratory an der Singapore University of Technology and Design (SUTD) schlägt nun einen neuen Ansatz vor: Statt sich ausschließlich auf die Verhinderung ürzen zu konzentrieren, sollen Roboter lernen, diese aktiv abzumildern und sich selbst zu fangen.
Die Forschung konzentriert sich auf Serviceroboter für Treppengänge. Trotz Fortschritten in der Gleichgewichtssteuerung und Pfadplanung bleiben diese Systeme anfällig. Laut einer mehrjährigen Feldstudie des Teams scheitern Treppenroboter auf Stufen mindestens 35-mal häufiger als auf ebenem Boden.
Sobald ein Sturz einsetzt, baut sich der Impuls schnell auf, was die Wiederherstellung der Stabilität erschwert und das Schadensrisiko erhöht. Herkömmliche Sicherheitssysteme setzen primär auf Prävention durch Navigationsalgorithmen, Hinderniserkennung und Stabilitätssteuerung.
Professor Mohan Rajesh Elara, Leiter des
Professor Mohan Rajesh Elara, Leiter des ROAR-Labors, argumentiert jedoch, dass diese Maßnahmen in realen Umgebungen das Risiko nicht vollständig eliminieren können.
Quellenprofil
Quelle und redaktionelle Angaben
- Quelle
- Interesting Engineering
- Canonical
- https://interestingengineering.com/ai-robotics/ai-robot-fall-mitigation-stair-climbing-sutd
- Quell-URL
- https://interestingengineering.com/ai-robotics/ai-robot-fall-mitigation-stair-climbing-sutd
Aehnliche Inhalte
Verwandte Themen und interne Verlinkung
Weitere Artikel aus aehnlichen Themenfeldern, damit Leser direkt im selben Kontext weiterlesen koennen.

Chinas pazifische Raketenprobe zeigt die Zerbrechlichkeit des globalen nuklearen Ordnungsrahmens
Die chinesische Regierung hat das Abfeuern eines strategischen Atom-U-Boots im Pazifik als routinemäßige Schulungsübung ohne Angriffsabsicht bezeichnet, was jedoch in der Region auf verstärkte Sicherheitsbedenken und diplomatische Reaktionen gestoßen ist. Während Peking und Moskau gemeinsam nach strategischer Stabilität streben, betonen US-Allianzen wie Japan, Australien und die USA, dass die nukleare Abschreckung auch Aufklärungssysteme, Raketenabwehr und Militärbasen umfasst, was die bestehenden Machtgleichgewichte zwischen der chinesisch-russischen Partnerschaft und dem US-geführten System neu definiert.
14.07.2026


