Neue Technologie ermöglicht humanoiden Robotern präzises Greifen zerbrechlicher Objekte
Humanoid-Roboter sind zunehmend in der Lage, komplexe Aufgaben in der realen Welt auszuführen, doch viele haben Schwierigkeiten mit geschicktem Objektmanipulation und Navigation in dynamischen Umgebungen.
Kurzfassung
Warum das wichtig ist
- Humanoid-Roboter sind zunehmend in der Lage, komplexe Aufgaben in der realen Welt auszuführen, doch viele haben Schwierigkeiten mit geschicktem Objektmanipulation und Navigation in dynamischen Umgebungen.
- Die Carnegie Mellon University (CMU) und das Bosch Center for AI haben nun ein neues KI-basiertes System entwickelt, das die Ganzkörperkoordination und den kontaktreichen Manipulation bei humanoiden Robotern verbessern soll.
- Das Rahmenwerk kombiniert Körperbewegung, Handfertigkeit und prädiktives Verständnis physikalischer Interaktionen, sodass Roboter Aufgaben wie das Falten, das Einfügen, das Schöpfen änden und das Transportieren Umgebungen besser bewältigen können.
SvyTech-Check
Redaktionelle Einordnung
Kernpunkt
Humanoid-Roboter sind zunehmend in der Lage, komplexe Aufgaben in der realen Welt auszuführen, doch viele haben Schwierigkeiten mit geschicktem Objektmanipulation und Navigation in dynamischen Umgebungen.
Warum relevant
Letzten Monat hat ein Zürich geleitetes Team ein Rahmenwerk entwickelt, das große Sprachmodelle mit ROS verknüpft, sodass Roboter natürliche Sprachanweisungen verstehen und reale physikalische Aufgaben autonom...
Einordnung
SvyTech ordnet die Meldung aus Interesting Engineering als Teil des Themenfelds Technologie ein und verweist auf den Originalartikel, damit Leser Fakten, Quelle und Kontext nachvollziehen koennen.
Letzten Monat hat ein Zürich geleitetes Team ein Rahmenwerk entwickelt, das große Sprachmodelle mit ROS verknüpft, sodass Roboter natürliche Sprachanweisungen verstehen und reale physikalische Aufgaben autonom ausführen können.
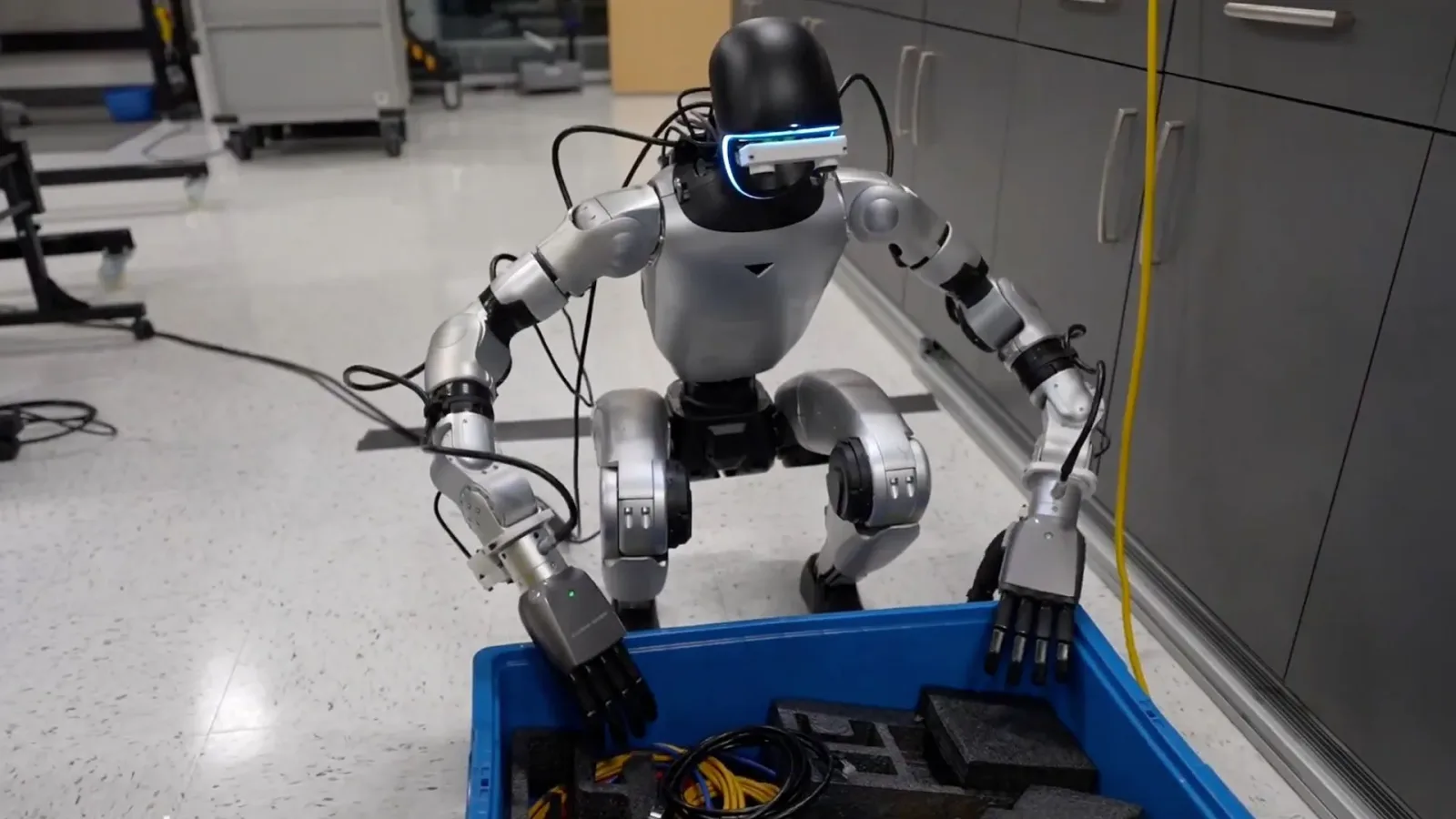
Lernen für geschickte Roboter: Die Forscher haben ein neues KI-Rahmenwerk entwickelt, um die Ganzkörper-Manipulation humanoider Roboter in Umgebungen mit vielen Kontakten zu verbessern.
Das System, das als Humanoid Transformer with Touch Dreaming (HTD) bezeichnet wird, verbindet Imitationslernen mit prädiktivem Tastschätzung, sodass Roboter vorhersagen können, wie sich physischer Kontakt, Kraft und taktiler Feedback während des Objekthandlings entwickeln.
Im Gegensatz zu herkömmlichen Systemen, die
Im Gegensatz zu herkömmlichen Systemen, die vorwiegend auf Vision und Bewegungssensorik angewiesen sind, integriert HTD verteilte taktile Sensorik, um das Situationsbewusstsein bei komplexen Interaktionen zu verbessern.
Quellenprofil
Quelle und redaktionelle Angaben
- Quelle
- Interesting Engineering
- Canonical
- https://interestingengineering.com/ai-robotics/new-model-humanoid-robot-fragile-objects
- Quell-URL
- https://interestingengineering.com/ai-robotics/new-model-humanoid-robot-fragile-objects
Aehnliche Inhalte
Verwandte Themen und interne Verlinkung
Weitere Artikel aus aehnlichen Themenfeldern, damit Leser direkt im selben Kontext weiterlesen koennen.

Molekularer Durchbruch zur Verjüngung von Kraftwerkszellen
Eine Studie des Fritz-Lipmann-Instituts zeigt, dass der altersbedingte Kraftverlust der Mitochondrien auf einen Rückgang des Lipidmoleküls Phosphatidylcholin zurückzuführen ist, dessen Nachschub die Zellenergiezentralen wiederbeleben kann. Während Männer einen allmählichen Abfall dieses Stoffes verzeichnen, leiden Frauen insbesondere während der Menopause unter einem plötzlichen Rückgang, was chronische Müdigkeit und ein höheres Risiko für neurodegenerative Erkrankungen wie Parkinson oder Diabetes begünstigen könnte.
28.06.2026
Live Redaktion

