Hugging Face stellt mit LeRobot Humanoid 3D-gedruckte Robotik für alle zugänglich.
Humanoid-Roboter bleiben für die meisten Menschen unerreichbar, da sie mit Kosten Auto sehr teuer sind.
Video
Im Original eingebettet
Kurzfassung
Warum das wichtig ist
- Humanoid-Roboter bleiben für die meisten Menschen unerreichbar, da sie mit Kosten Auto sehr teuer sind.
- Humanoid-Roboter gelten für die meisten Menschen bisher als unerreichbar, da ihre Anschaffungskosten oft mehrere Tausend Euro betragen und damit das Preisniveau eines Neuwagens erreichen.
- Mit dem neuen Open-Source-Projekt „LeRobot Humanoid" will Hugging Face diese Hürde senken.
SvyTech-Check
Redaktionelle Einordnung
Kernpunkt
Humanoid-Roboter bleiben für die meisten Menschen unerreichbar, da sie mit Kosten Auto sehr teuer sind.
Warum relevant
Das Unternehmen bietet damit eine kostengünstige Alternative, die aus 3D-gedruckten Komponenten besteht und speziell für Lernprozesse und Experimente konzipiert ist.
Einordnung
SvyTech ordnet die Meldung aus Interesting Engineering als Teil des Themenfelds Technologie ein und verweist auf den Originalartikel, damit Leser Fakten, Quelle und Kontext nachvollziehen koennen.
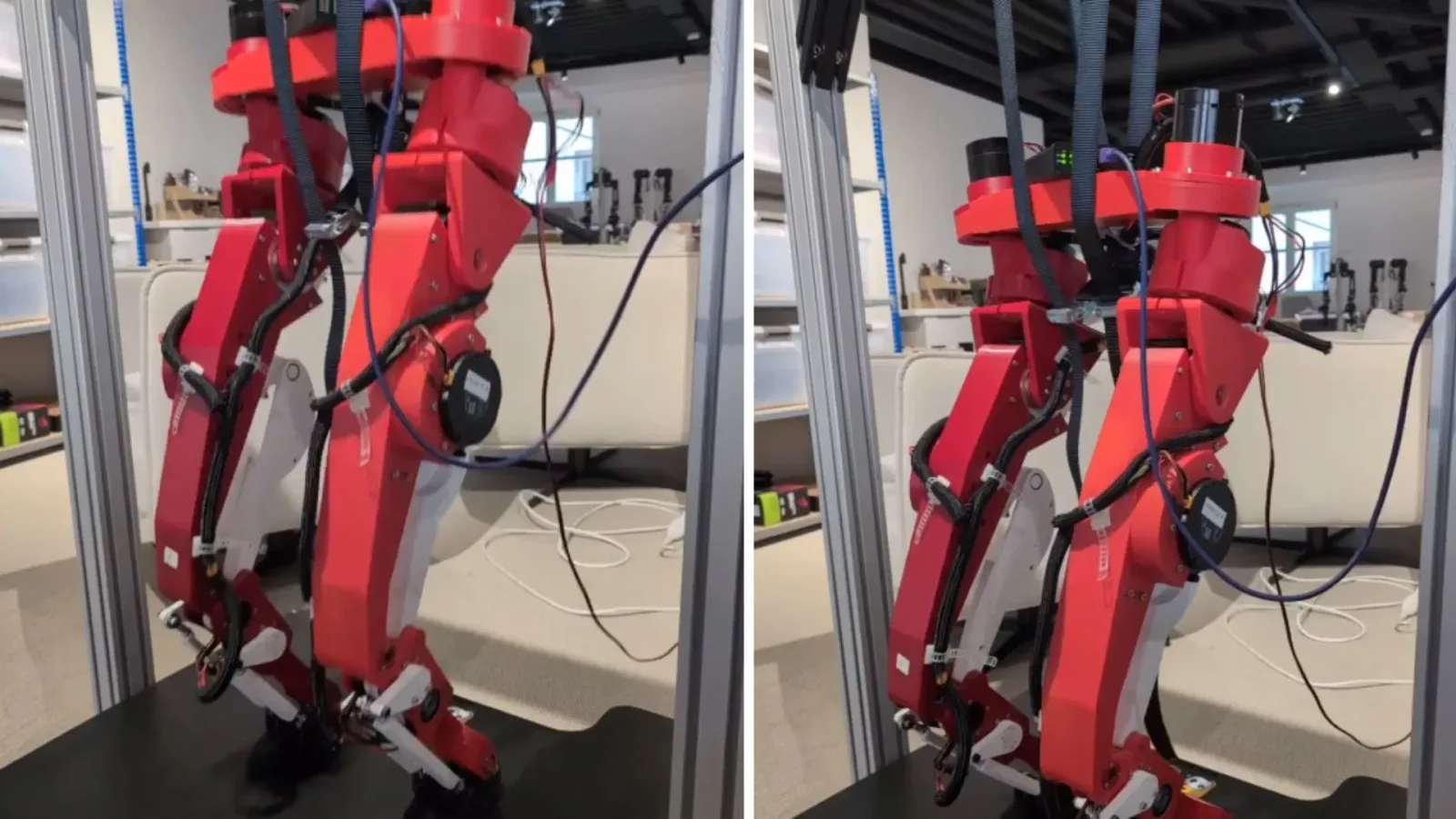
Das Unternehmen bietet damit eine kostengünstige Alternative, die aus 3D-gedruckten Komponenten besteht und speziell für Lernprozesse und Experimente konzipiert ist. Obwohl die derzeitige Version sich ausschließlich auf die robotischen Beine konzentriert, stellt die Plattform einen erschwinglichen Einstieg in die Entwicklung humanoider Roboter dar.
Das System kostet rund 2.500 US-Dollar und richtet sich an Hobbyisten, Forscher sowie Entwickler, die fortgeschrittene Robotik erkunden möchten, ohne die üblichen hohen finanziellen Barrieren überwinden zu müssen. Im April 2025 betrat Hugging Face, mit Sitz in New York, erstmals den Hardwaremarkt, indem es das französische Startup Pollen Robotics übernahm.
Dieses Unternehmen ist der Schöpfer des Open-Source-humanoiden Roboters Reachy 2. Die Open-Hardware-Plattform LeRobot wurde als modulare bipedale Roboterplattform entwickelt. Sie setzt sich aus 3D-gedruckten mechanischen Bauteilen, handelsüblicher Hardware sowie kostengünstigen Aktuatoren und Elektronik zusammen.
Die aktuelle Version kostet etwa 2.500
Quellenprofil
Quelle und redaktionelle Angaben
- Quelle
- Interesting Engineering
- Canonical
- https://interestingengineering.com/ai-robotics/us-hugging-face-3d-printed-lerobot
- Quell-URL
- https://interestingengineering.com/ai-robotics/us-hugging-face-3d-printed-lerobot
Aehnliche Inhalte
Verwandte Themen und interne Verlinkung
Weitere Artikel aus aehnlichen Themenfeldern, damit Leser direkt im selben Kontext weiterlesen koennen.

Die Los Angeles Police Department beendet den Vertrag mit dem Überwachungsunternehmen Flock aus Datenschutzgründen.
Das Los Angeles Police Department (LAPD) hat den dreijährigen Vertrag mit dem Überwachungsdienstleister Flock Safety beendet, der bundesweit Tausende für die Fahrzeugüberwachung einsetzte. Als Begründung für die Nichtverlängerung des am Samstag auslaufenden Vertrags wurden ernste Bedenken hinsichtlich zivilfreier Rechte und des Schutzes personenbezogener Daten angeführt, da die operative Kontrolle und Dateninfrastruktur direkt vom Unternehmen verwaltet wurden.
13.07.2026
Live Redaktion

