20 Beine ermöglichen Argus-Roboter Bewegungsfreiheit in alle Richtungen
Forscher der Duke University haben ein neuartiges robotisches System entwickelt, das traditionelle Gestaltungsprinzipien Frage stellt, indem es gleichmäßige Bewegung in alle Richtungen vor menschlich anmutender Form
Kurzfassung
Warum das wichtig ist
- Forscher der Duke University haben ein neuartiges robotisches System entwickelt, das traditionelle Gestaltungsprinzipien Frage stellt, indem es gleichmäßige Bewegung in alle Richtungen vor menschlich anmutender Form
- Statt einer menschenähnlichen Form priorisiert das Design gleichmäßige Bewegungsfähigkeit in alle Richtungen.
- Um ein Konzept zu finden, das nahe an der theoretischen Leistungsgrenze liegt, simulierten das Team über 1.500 verschiedene Roboterkonfigurationen.
SvyTech-Check
Redaktionelle Einordnung
Kernpunkt
Forscher der Duke University haben ein neuartiges robotisches System entwickelt, das traditionelle Gestaltungsprinzipien Frage stellt, indem es gleichmäßige Bewegung in alle Richtungen vor menschlich...
Warum relevant
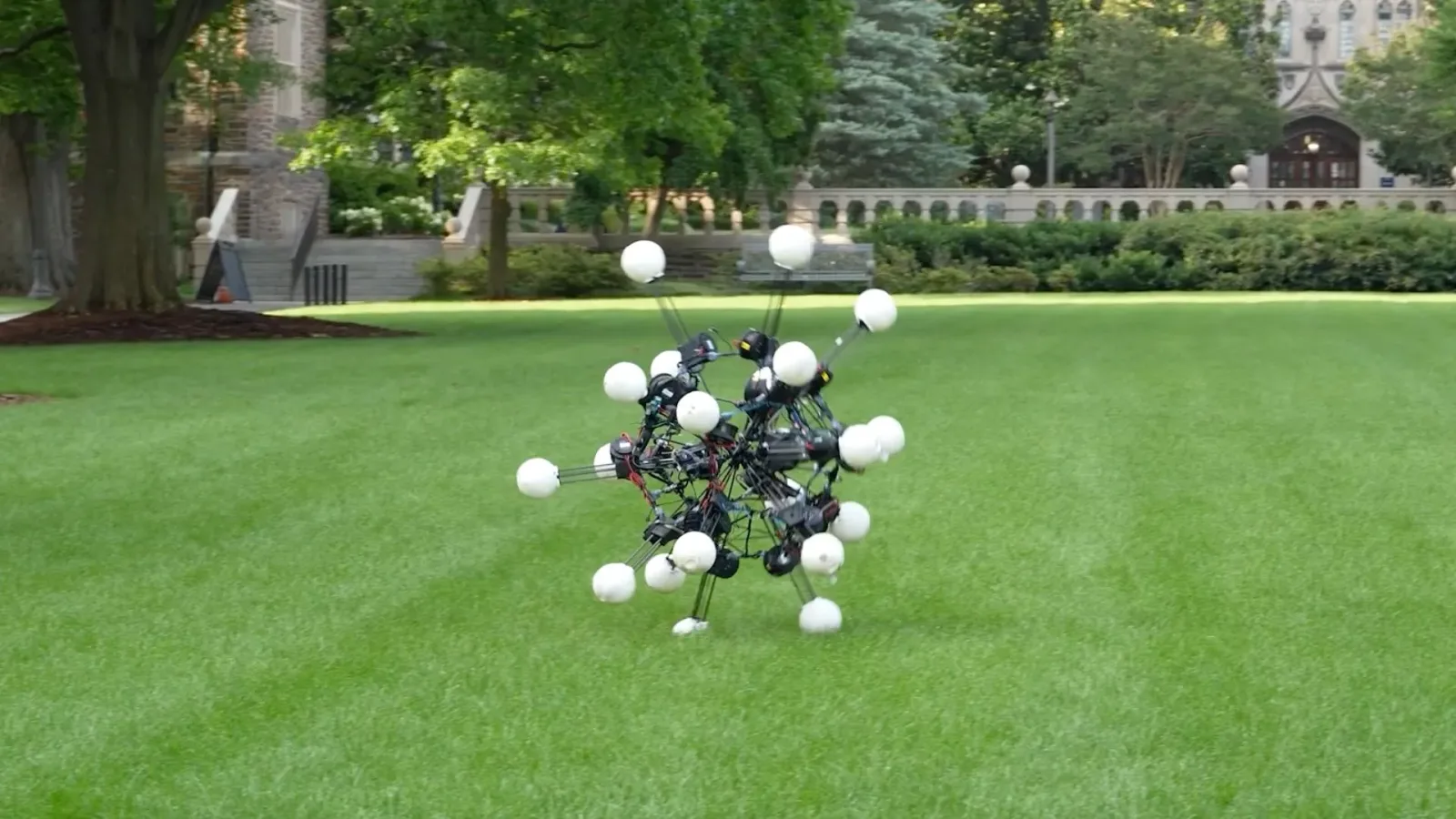
Es verfügt über 20 modulare, teleskopierbare Beine, die radial um einen zentralen Kern angeordnet sind und jeweils mit einer Tiefenkamera ausgestattet sind.
Einordnung
SvyTech ordnet die Meldung aus Interesting Engineering als Teil des Themenfelds Technologie ein und verweist auf den Originalartikel, damit Leser Fakten, Quelle und Kontext nachvollziehen koennen.
Es verfügt über 20 modulare, teleskopierbare Beine, die radial um einen zentralen Kern angeordnet sind und jeweils mit einer Tiefenkamera ausgestattet sind.
Diese unkonventionelle Struktur ermöglicht laut dem Entwicklungsteam eine effiziente Fortbewegung und Stabilisierung auf unterschiedlichen Untergründen sowie komplexe räumliche Manöver in verschiedenen Umgebungen. Die Fähigkeiten mathematisch abgeleiteten Gestaltungsprinzip, das vom Team als „dynamische Isotropie" bezeichnet wird.
Die meisten modernen Robotersysteme, einschließlich fortschrittlicher Vierbeiner, Humanoiden und herkömmlicher Drohnen, erzielen bei dieser Messgröße typischerweise Werte unter 0,6. Im Gegensatz dazu erreicht Argus einen Wert von 0,91 und liegt damit nahe am theoretischen Maximum.
Technik, Energie und Einsatz
Dieses hohe Maß an Symmetrie ermöglicht Leistungssteigerungen in nahezu allen zentralen Robotik-Metriken, einschließlich Bahnverfolgung, Energieeffizienz, Widerstandsfähigkeit gegenüber Schäden, Robustheit und erfolgreicher Navigation in komplexem Gelände.
Quellenprofil
Quelle und redaktionelle Angaben
- Quelle
- Interesting Engineering
- Canonical
- https://interestingengineering.com/ai-robotics/new-20-legged-argus-robot-redefines-robotics-with-directionless-movement-design
- Quell-URL
- https://interestingengineering.com/ai-robotics/new-20-legged-argus-robot-redefines-robotics-with-directionless-movement-design
Aehnliche Inhalte
Verwandte Themen und interne Verlinkung
Weitere Artikel aus aehnlichen Themenfeldern, damit Leser direkt im selben Kontext weiterlesen koennen.

Künstliche Intelligenz entschlüsselt das mysteriöse molekulare Gefüge von Wasser
Ein Forschungsteam der Universität Osaka hat eine auf künstlicher Intelligenz basierende Methode entwickelt, um die mikroskopischen Strukturveränderungen von überkühltem Wasser präzise zu analysieren und zu vergleichen. Durch das Training eines neuronalen Netzes mit Molekulardynamik-Simulationen konnten die Wissenschaftler die effektivsten Deskriptoren identifizieren, um die Übergänge zwischen hochdichten und niedrigdichten Flüssigkeitsstrukturen zu untersuchen und so das Verständnis für die einzigartigen physikalischen Eigenschaften .
12.07.2026
Live Redaktion